











- WIADOMOŚCI
- ANALIZA
Polish Unmanned Anti-Mine Systems Have Passed Another Test


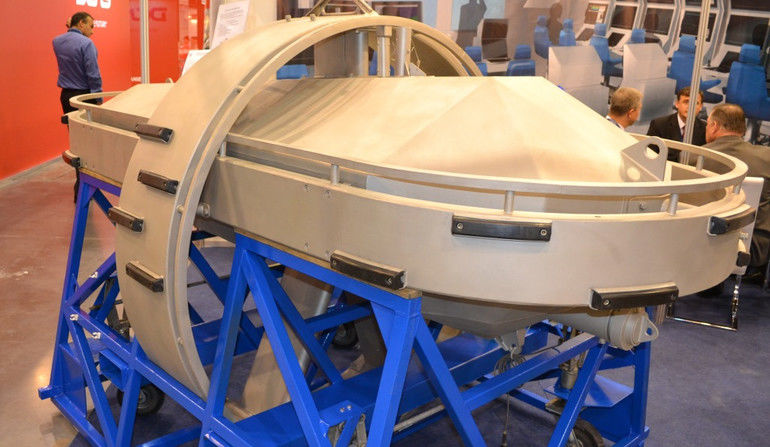
Autonomous surface platform, developed by OBR CTM S.A. (Research and Development Centre for Maritime Technology) - Image Credit: OBR CTM S.A. 
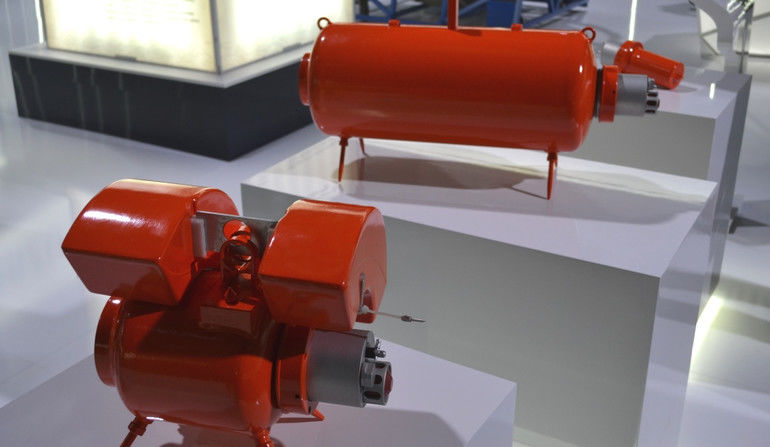
Magnetic actuator of the Modular Light No-Contact Sweep device. Image Credit: M.Dura 
During the tests in the Gdansk Bay, German disposable Sea Fox self propelled mine-sweeper was being tested. Image Credit: M.Dura 
Edredon was the first Polish surface platform that could have been applied in mine-hunting applications. Image Credit: M.Dura 
Polish specialty - A family of remotely controlled explosives used to neutralize the mines - Toczek B, Toczek A and Toczek C. Image Credit: M.Dura 
Sensor platform, developed by OBR CTM S.A. (Research and Development Centre for Maritime Technology) - Image Credit: OBR CTM S.A.
Between August and September this year, within the waters of the Bay of Gdansk, and in the laboratories of the Research and Development Centre for Maritime Technology in Gdynia (OBR CTM S.A), a successful test programme was being conducted, concerning systems that may be used to search and destroy the naval mines. During the tests, the Polish solutions turned out to be very useful, and it was proven that they may be successfully applied by the Polish Navy. On condition that these devices are going to be desirable in the future.
During the research, carried out between 24th August and 18th September 2015 (Poland, represented by OBR CTM S.A, was the host-nation for the test programme), systems developed within the scope of the BURMIN (“Burried Mines”) programme were tested. The said programme is a part of a wider initiative executed by the European Defence Agency. The aim of the BURMIN initiative is to asses the unmanned maritime systems that would be usable during the naval operations, above all, in the minehunting operations (“European Unmanned Maritime Systems (UMS) for Mine Counter Measures and other naval applications)”.

In order to do that, a task consortium has been established. The said consortium is lead by the Thales Underwater Systems company from France, and it gathers companies from, besides Poland represented by OBR CTM S.A, Belgium (RMA), the Netherlands (TNO), and Germany (WTD-71, Atlas Elektronik, Fraunhofer oraz IPHT). BURMIN programme is important and innovative, due to the fact that its purpose is to find a solution which would make it possible to detect bottom and burried naval mines. Secondly, the initiative is also going to define shared requirements and standards that could be pursued, in case of the prospective systems used for that purpose.

OBR CTM S.A is - in this case - well positioned, since the centre has been successful within the area of mine detection (offering a stabilized sensor platform), as well as within the area of neutralizing the threat posed by the naval mines (offering the light modular minesweep and TOCZEK M remotely controlled explosives).
Way to act against bottom mines and burried mines
Both the sensor platform, as well as the MLM sweep, developed by the OBR CTM S.A facility, are operated on the basis of the same principle, according to which sweeping and detection effectiveness increases when a variable depth detection and sweeping system is utilized, meaning that the detectors are placed close to a location, in which a mine may be placed.
When one wants to maintain proper level of safety, it is assumed that the systems are carried or towed by surface unmanned systems. Using a joint standard will make it possible to blend the international solutions together, which is well exemplified by the fact that the Polish MLM sweep is integrated with the “Sterren Du” surface platform, created by the French DCNS shipyard facility. This platform acts as the tugboat for the applied systems.

When it comes to the effectors, in the tests that took place back in September last year, the following systems were tested: indirect impact systems, which operate by activating the mine fuses, while this year; direct impact systems, including self-propelled disposable Atlas Elektronik Seafox devices, or OBR CTM S.A wireless TOCZEK M explosives, carried by a German unmanned submersible Atlas Elektronik SeaOtter craft.

In case of the sensor, the assessment of an underwater “sensor platform” was carried out. The platform also is operated remotely by a crew, working from a small manned platform. Ultimately this platform is going to be towed by an autonomous surface platform.
Both solutions are going to:
- increase the minehunting capabilities in shallow waterss (peculiar for Southern Baltic);
- limit the costs and increase safety of the minehunting operations, through application of unmanned platforms controlled from dedicated or non-dedicated vessels, with the latter ones being provisionally tailored to fit that purpose (e.g. patrol vessels or even mobilized civil ships);
- increase safety, by removing the personnel from the area in which the mine threat exists, as all of the operations are carried out by remotely controlled minehunting systems.
Utilizing this type of solutions in Poland is relatively easy, since the country is in possession of a proper research and industrial potential, required to develop and manufacture effective unmanned platforms domestically. The above is exemplified by the “Głuptak” disposable self-propelled explosivve device, or by the “Ukwiał” underwater robot. Applying own, original solutions will also make it possible to create an unified and independent system, the purpose of which would be to provide a proper level of support, within the scope of logistics.
Goal for today - APN - Autonomous Surface Platform
The operational programmes related to the Navy need to be coordinated without any delays, since the said programmes are frequently tied together. Thus, solutions related to the OPM modules based on surface platforms, proposed to be created within the scope of the APN initiative, shall also be used in the process of designing patrol vessels with minehunting capabilities (Czapla class), and other way around.
On the other hand, Kormoran II minehunters may be customized, in order to be used for realizing remote control of the APN surface platforms, towing the Modular Light Minesweep (UMS EDA MLM) or the underwater sensor platform, with the latter device being developed within the framework of the UMS EDA BURMIN programme.
However, the main problem here stems from the fact that no APN platform, capable of realizing this type of tasks, exists. So far, only four countries were able to create remotely controlled surface vessels, capable of towing the modular minesweep systems: France, Germany, United States and United Kingdom. In case of Poland, serious research programme within that area has been stopped.
Polish Autonomous Surface Platform on hold
The works related to the Polish autonomous platform were started along with the strategic „Bezzałogowe Morskie Platformy Nawodne i Podwodne (BMPNiP)” [Unmanned Maritime Surface and Submersible Platforms] programme, recommended by the Ministry of Defence Armament Council back in 2010. Back in December 2012, after an order had been placed by the National Centre for Research and Development, a consortium, consisting of the Polish Naval Academy, Gdansk University of Technology, OBR CTM S.A. (leader) and ITTI Sp. z o., developed a feasibility study regarding the strategic programme, the aim of which would be to raise the level of national security, under the name of “Unmanned maritime surface and submerged platforms, supporting the minehunting vessels and non-dedicated platforms during the minehunting operations”.

The study suggested that “...Poland is in possession of a proper research and industrial potential, required to develop, design and manufacture unmanned maritime platforms”. After a request was placed by the Ministry of Defence, back in January 2013, the consortium, composed of the same companies, as in the prior case, has developed a full feasibility study for a strategic programme, the aim of which would be to raise the level of national security and defence capabilities, under the name of “Unmanned maritime surface and submerged platforms, supporting the minehunting vessels and non-dedicated platforms during the minehunting operations”.
The study was accepted by the Ministry of Defence without any objections, and after the relevant request was placed by the Minister of Defence, the National Centre for Research and Development initiated a Security and Defence competition back in 2013, within the framework of which the “Unmanned maritime surface and submerged platforms, supporting the minehunting vessels and non-dedicated platforms during the minehunting operations” programme has been established.
At the moment when the said programme was initiated, Ministry’s of Defence Department of Science and Military Education considered to correlate the realization of the newly established programme and the “Modern Kormoran II Minehunter” development project with the projects that were realized within the framework of UMS EDA (MLM and BURMIN), which led to development of highly rated, both locally, as well as abroad, solutions that could be used in case of the Autonomous Surface Platforms.
The Consortium consisting of the Polish Naval Academy, Gdansk University of Technology, OBR CTM S.A. (leader) and Warsaw University of Technology, with Ship Design and Research Centre acting as a sub-contractor, placed requests regarding all of the projects realized within the programme. The said requests received positive opinions.
However, due to the fact that the budget was significantly limited, and according to a recommendation by the Commander of the Polish Navy, an Agreement was signed to realize the “Autonomiczne Platformy Nawodne (APN)” [Autonomous Surface Platforms] initiative. At the same time, it was declared that there is a will to initiate the remaining projects, with a restriction that this would be dependent on the financial assets. The remaining projects include:
- Autonomiczne Platformy Podwodne (APP) [Autonomous Submersible Platforms];
- Detection, classification, identification and neutralization system for APN and APP;
- Information control and management for APN and APP platforms (Prototype of a local command station);
- Integration of the minehunting systems for the autonomous platforms.
Back in March 2014, the consortium provided the National Centre for Research and Development with the results of the first stage of the programme, creating the actual initial tactical and technical assumptions. These were presented in front of the Supervising Team, created by the Director of the National Centre for Research and Development, in April. No objections were submitted. In mid-2014, when a laboratory for integrating the naval battle systems at the CTM was opened, a ready hull for an unmanned system also made its first public appearance. However, the fact that the tactical and technical requirements were not approved, lead to suspension of funding, according to the decision made by the National Centre for Research and Development Director. This forced the engineers to terminate the works.
Now, it should be taken into consideration, whether the long approval process regarding the tactical and technical requirements did not have a detrimental impact on the development of the Polish unmanned platforms, including the maritime ones. Additional consideration should be made as to whether the above is not a cause for lack of capabilities to manufacture and deliver the said platforms, according to the armed forces modernization programme.


